흔들리는 센서 속에서 네 노이즈가 느껴진거야: MPU6050과 상보필터
상보필터는 시계열 데이터에서 새로운 값이 들어왔을 때 이전 값을 이용하여 오차를 보정하는 재귀필터 중 한 종류입니다.
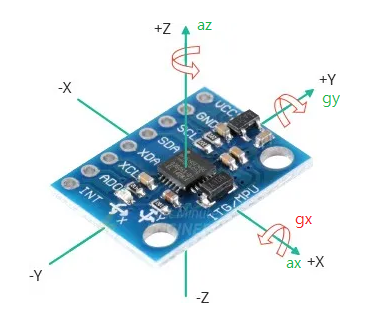
MPU6050 모듈은 대표적인 자이로가속도 센서 모듈로, 아두이노에서 로봇의 기울어진 정도를 구할 때 사용합니다.
각도 변환
MPU6050은 물체의 가속도와 각속도(자이로) 값을 출력하는데, 아래와 같이 각도로 변환할 수 있습니다.
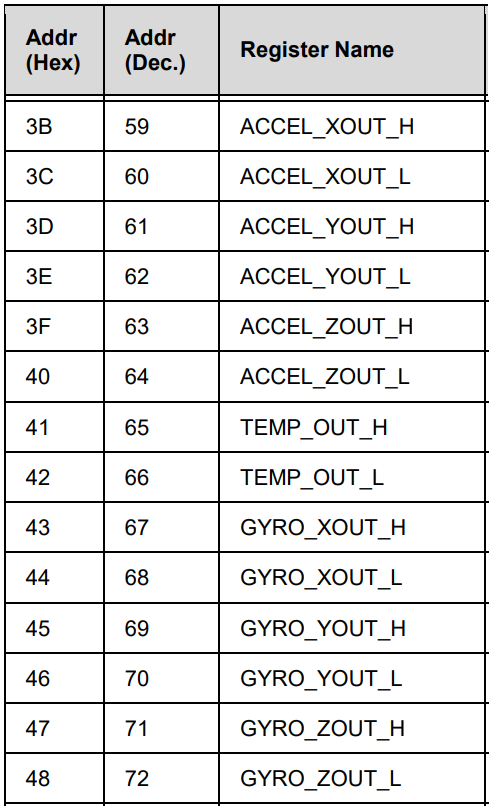
MPU6050에 온도(
TEMP_OUT) 센서도 포함되어 있는 이유는, 자이로 센서가 온도에 민감하게 반응하기 때문입니다.
가속도 -> 각도
float angle_ax = atan(ay / sqrt(ax * ax + az * az)) * (180 / PI);
가속도 센서는 충격과 진동에 민감하게 반응하기 떄문에 물체가 급격하게 움직이면 큰 오차가 발생합니다.
따라서 가속도를 이용해 각도를 계산한다면, 순간적으로 값이 튀는 고주파 노이즈를 걸러줄 필요가 있습니다.
각속도 -> 각도
float angle_gx = 0;
float gx = (float) gx / 131;
angle_gx += gx * dt;
dt는 샘플링 간격(angle_gx업데이트 주기)입니다.
코드에서 보시다시피, 자이로 센서는 값을 누적하여 각도를 계산합니다.
따라서 angle_gx에는 오차가 누적되게 되며, 이는 저주파 노이즈를 만들어 냅니다.
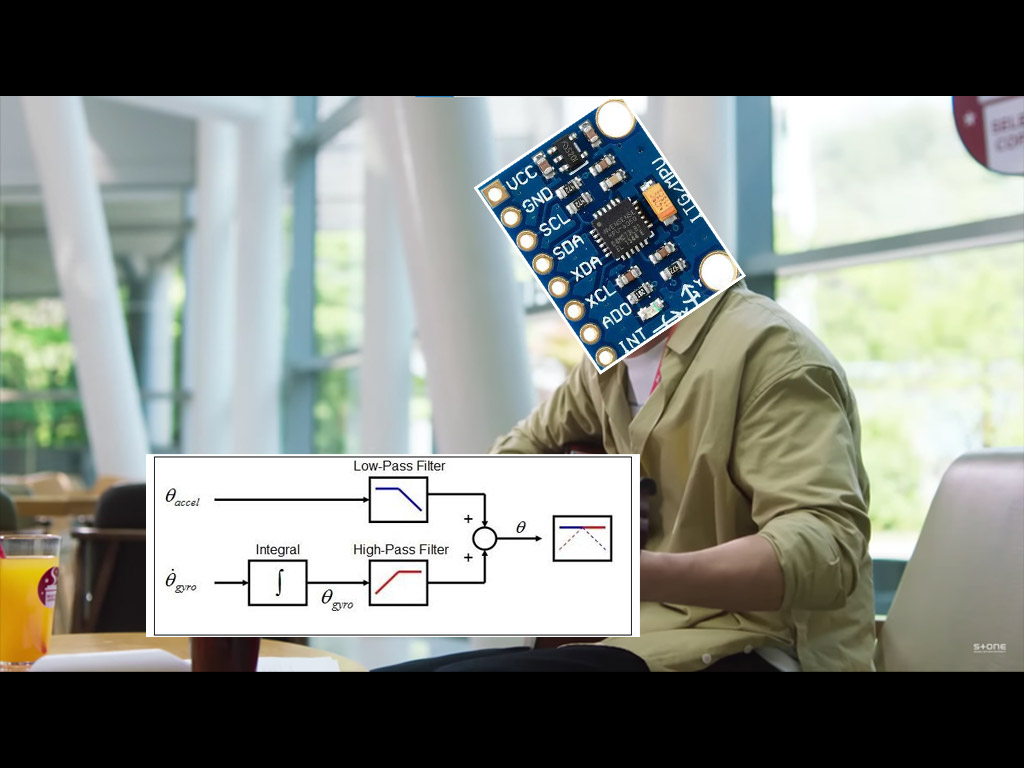
상보필터

상보필터는 고주파 노이즈를 가진 가속도 값과 저주파 노이즈를 가진 자이로 값을 종합하여 각도를 계산합니다.
#define ALPHA 0.96
float angle_x = 0;
angle_x = ALPHA * (angle_x + gx * dt) + (1 - ALPHA) * angle_ax;
ALPHA는 자이로 값과 가속도 값의 반영 비율입니다.
일반적으로는 0.96을 사용하는데, 저주파 노이즈가 잡히지 않는다면 ALPHA 값을 내려서 가속도 값의 비중을 늘리면 됩니다.
상보 필터는 설계가 간단하여 연산량이 적기 때문에 성능이 낮은 MCU 등에서 주로 사용하게 됩니다.
참고: A Fast and Robust Algorithm for Orientation Estimation Using Inertial Sensors
참고: Mission Planning and Waypoint Navigation of a Micro Quad Copter by Selectable GPS Co-Ordinates